Люди часто воспринимают свои способности к мелкой моторике как нечто само собой разумеющееся. Воссоздание механической точности человеческого тела — непростая задача, которую аспиранты факультета машиностроения CMU надеются упростить с помощью искусственного интеллекта.
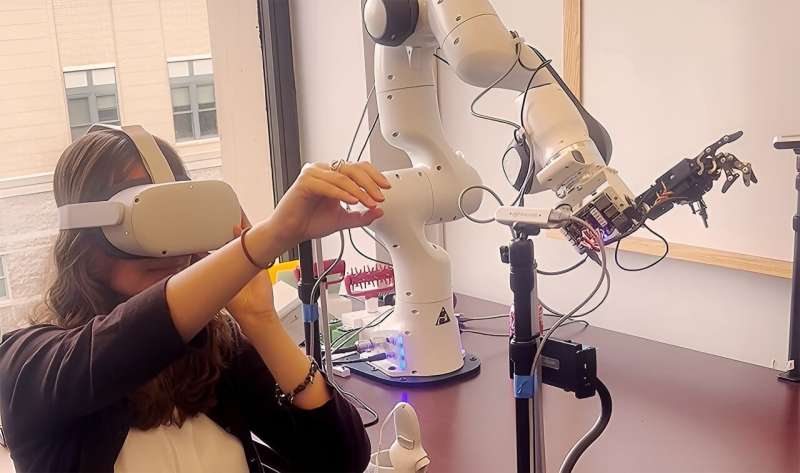
Кандидаты наук Элисон Бартч и Абрахам Джордж под руководством Амира Барати Фаримани, доцента кафедры машиностроения, сначала воссоздали простую задачу, такую как сбор блока, используя симуляцию виртуальной реальности. Используя этот пример, они затем смогли дополнить различные “человекоподобные” примеры движений, чтобы помочь роботу в обучении.
“Если я хочу показать вам, как выполнить задание, мне просто нужно сделать это один или два раза, прежде чем вы возьметесь за него”, – сказал Джордж. “Итак, очень многообещающе, что теперь мы можем заставить робота повторять наши действия всего после одной или двух демонстраций. Мы создали структуру управления, где он может наблюдать за нами, извлекать то, что ему нужно знать, а затем выполнять это действие”.
Команда обнаружила, что дополненные примеры помогли значительно сократить время обучения робота задаче выбора и размещения блоков по сравнению с одной только архитектурой машинного обучения. Это, в сочетании со сбором данных о человеке с помощью моделирования с помощью гарнитуры виртуальной реальности, означает, что этот метод исследования потенциально может дать многообещающие результаты “менее чем за минуту при участии человека”.
Джордж описал задачу создания дополненных примеров, которые были бы одновременно надежными и “новыми” для ИИ, чтобы он мог учиться на них, чтобы он мог распознавать более тонкие различия в одних и тех же движениях.
“Хорошая аналогия для этого заключается в том, что когда вы пытаетесь обучить компьютер распознавать изображение собаки, вы можете показать ему сотни изображений собак и кошек”. – сказал Джордж. “Но мы пытаемся обучить компьютер идентифицировать собаку только по одному дополненному изображению. Поэтому, если мы покажем ему собаку другой породы, компьютеру будет трудно идентифицировать ее как собаку”.
Уже заглядывая вперед, Бартч планирует использовать аналогичные методы, чтобы научить робота взаимодействовать с более податливым материалом — в частности, с глиной — и предсказать, как он будет формировать их.
“Для достижения конечной цели – появления роботов в мире – они должны быть способны предсказывать, как поведут себя различные материалы”, – сказал Бартч. “Если вы подумаете о роботе-помощнике дома, то материалы, с которыми он будет взаимодействовать, поддаются деформации: пища поддается деформации, губки поддаются деформации, одежда поддается деформации”.